
makecode 的 OTTO 外掛連結注意事項: 目前此連結預載了 neopixel 的指令,因這個指令與藍芽指令不能相容,因此只能使用兩片 microbit 的 2.4g 功能來溝通控制。 https://github.com/KittenBot/pxt-robototto 複製以上連結,貼上makecode 擴展功能 擴展說明: 此擴展需配合 robotbit 轉接板使用,指令內容為OTTO機器人的舵機控制,並且已經內建了常用的動作指令,例如: 前進,轉向等等的動作。
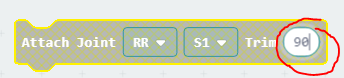 3. 這裡是修正微調的數值,因為舵機組裝時鎖上舵片後十字點都會有偏移,所以用數字來微調舵機的中心點。 OTTO 行動控制 4. 這個範例是使用2.4g radio 的通訊功能來測試機器人的動作。
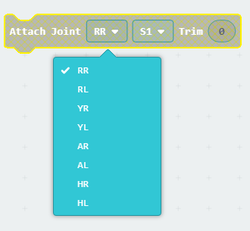
如果你的OTTO機器人動作很怪,有可能是關節的位置設定錯誤,請重新檢查舵機的接點是不是對應了對的位置。
0 評論
發表回覆。 |
作者將一些常見問題提出解決方案。 發布紀錄
八月 2022
類別
全部
|
 RSS 訂閱
RSS 訂閱

全佑電腦- 機器人科學館 © 2013 All RightReserved. TEL:(+886) 03-9560365 265 宜蘭縣羅東鎮公正路298號 No.298, Gongzheng Rd., Luodong Township, Yilan County 265, Taiwan (R.O.C.) 聯絡我們 |
|