
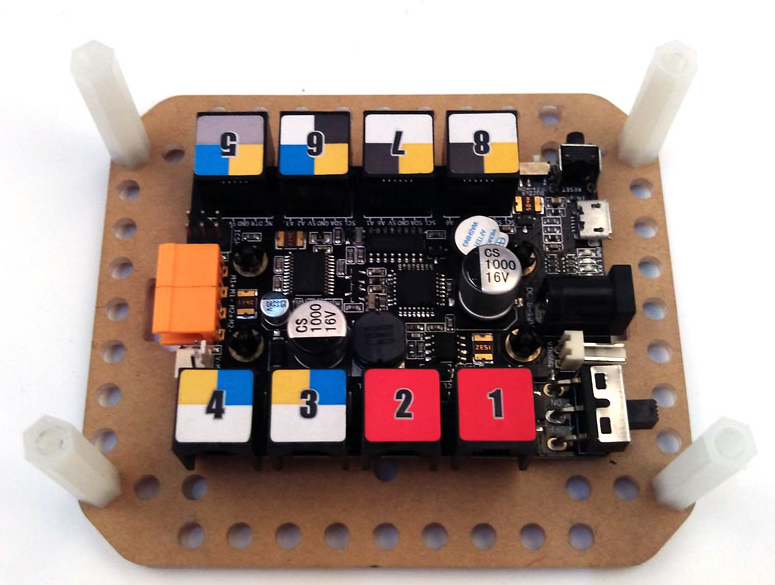
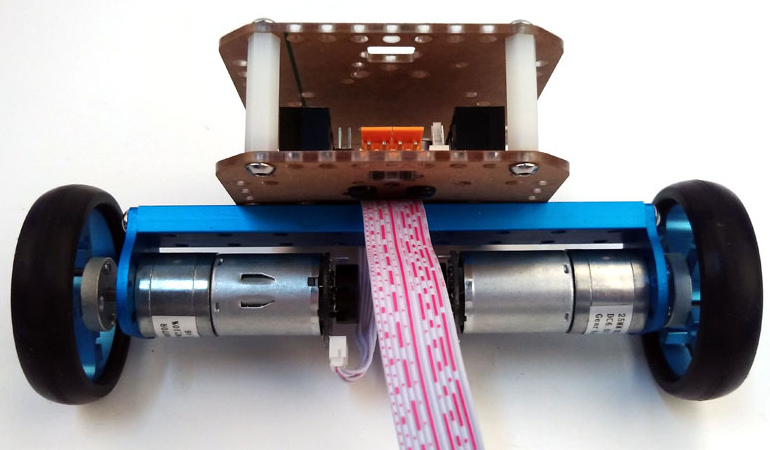
雙輪平衡小車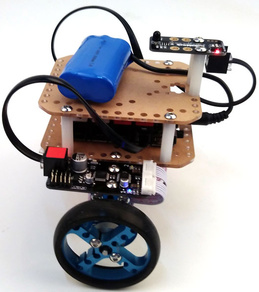

Arduino原始程式碼:https://github.com/xeecos/me-orion-balance-bot 、 Arduino.zip #include "MeOrion.h"
#include "MeEncoderMotor.h" #include "MeSerial.h" #include "MeInfraredReceiver.h" #include <Wire.h> #include <SoftwareSerial.h> #define RELAX_ANGLE 7.5 //Nature Balance Angle #define MOTOR_ENABLE //Enable Motor /**************Line Finder***************/ #define LED_1 !(PINB&(1<<0)) //8 #define LED_2 !(PIND&(1<<2)) //2 #define LED_3 !(PINB&(1<<4)) //12 #define LED_4 !(PINB&(1<<5)) //13 /***************Regist Flags***************/ #define COMDONE 0x0001 //Frame Command End #define MOVING 0x0002 //Moving #define TRACING 0x0004 //Tracing #define START 0x0008 //Start MeEncoderMotor encoder; MeInfraredReceiver ir(PORT_6); /***************MPU6050 Define**********************/ double accX, accY, accZ; double gyroX, gyroY, gyroZ; double compAngleY, gyroYangle; int16_t tempRaw; uint32_t IMU_timer; uint8_t i2cData[14]; /***************PID Define**********************/ typedef struct { double P, I, D; double Setpoint, Output, Integral, last_error; uint32_t Timer; } PID; PID PID_angle, PID_speed, PID_turn; uint32_t FLAG; char comdata[19], data_p; //Serial Data float joy_x, joy_y; void setup() { /*********************Initialize********************/ Serial.begin(115299); //Serial Wire.begin(); //I2C Wire ir.begin(); //Infred Received /*********************MPU6050 initialize********************/ i2cData[0] = 7; i2cData[1] = 0x00; i2cData[2] = 0x00; i2cData[3] = 0x00; while (i2cWrite(0x19, i2cData, 4, false)); while (i2cWrite(0x6B, 0x01, true)); while (i2cRead(0x75, i2cData, 1)); if (i2cData[0] != 0x68) while (1); delay(100); while (i2cRead(0x3B, i2cData, 6)); accX = (i2cData[0] << 8) | i2cData[1]; accY = (i2cData[2] << 8) | i2cData[3]; accZ = (i2cData[4] << 8) | i2cData[5]; tempRaw = (i2cData[6] << 8) | i2cData[7]; double pitch = atan(-accY / sqrt(accX * accX + accZ * accZ)) * RAD_TO_DEG; gyroYangle = pitch; compAngleY = pitch; IMU_timer = micros(); /*********************Encoder********************/ encoder.begin(); encoder.setMode(0, 1); //pwm mode encoder.setMode(1, 1); /*********************PID Initialize********************/ PID_angle.Setpoint = RELAX_ANGLE; PID_angle.P = 22.0; //18 PID_angle.I = 0.05; //0.1 PID_angle.D = 0.001; //0.0005 PID_turn.P = 10; PID_turn.D = 30; PID_revalue(); IMU_fillter(); //FLAG |= TRACING; PID_speed.Setpoint = 0; gyroYangle = RELAX_ANGLE; compAngleY = RELAX_ANGLE; FLAG |= START; } long receiveTime = 0; void loop() { if(ir.buttonState()){ while(ir.available()){ parseJoystick(ir.read()); receiveTime = micros(); } } if(micros()-receiveTime>100000){ receiveTime = micros(); parseJoystick(0xFA); } IMU_fillter(); PID_revalue(); PID_angle_compute(); PID_speed_compute(); PID_angle_compute(); }
1 評論
Kevin
5/4/2017 02:08:55 pm
請問有在賣這個的整組套件嗎? 發表回覆。 |
 RSS 訂閱
RSS 訂閱
