
Me Compass 1、概 述 電子羅盤模組可以檢測周圍的磁場強度,可應用於使運動的裝置或設備轉動到指定的方向等,比如安裝在小車上,可以控制小車轉動到指定方向或沿著指定方向行走。模組上具有用於校準的按鍵和指示燈,當模組周圍的機械結構或模組的安裝位置(方向)發生改變時,用戶可以通過下載 Makeblock提供的程式並操作按鍵來進行校準,以使得模組在新的環境下能準確測量出角度值。這也是本模組相比于其他商家同類型產品的優勢之一。該本 模組介面是白色色標,說明是I2C通信模式,需要連接到主機板上帶有白色標識的連接埠。 2、技術規格 l 工作電壓:5V DC l 解析度:5 mil gauss l 磁場動態範圍:±1到±8 gauss l 電子羅盤精度:可精確到1°到2° l 信號模式:I2C通信 l 工作溫度:-30到85℃ l 模組尺寸:52 x 24 x 18 mm (長x寬x高) 3、功能特性 l 模組的白色區域是與金屬梁接觸的參考區域; l 模組有兩種工作模式:測量模式→藍燈常亮,校準模式→藍燈閃爍; l 在通電後第一次使用模組時需要校準模組; l 具有反接保護,電源反接不會損壞IC。 l 支援Arduino IDE程式設計, 並且提供運行庫來簡化程式設計; l 支援mBlock圖形化程式設計,適合全年齡用戶; l 使用RJ25介面連線方便; l 模組化安裝,相容樂高系列; l 配有接頭支援絕大多數Arduino系列主控板。 4、引腳定義 電子羅盤模組有六個針腳的接頭,每個針腳的功能如下表(表1):
表1. 6-Pin 接口功能 5、接線方式 l RJ25連接 由於電子羅盤模組介面是白色色標,當使用RJ25介面時,需要連接到主控板上帶有白色色標的連接埠。以Makeblock Orion為例,可以連接到3,4,6,7,8 號連接埠,如圖(圖1): 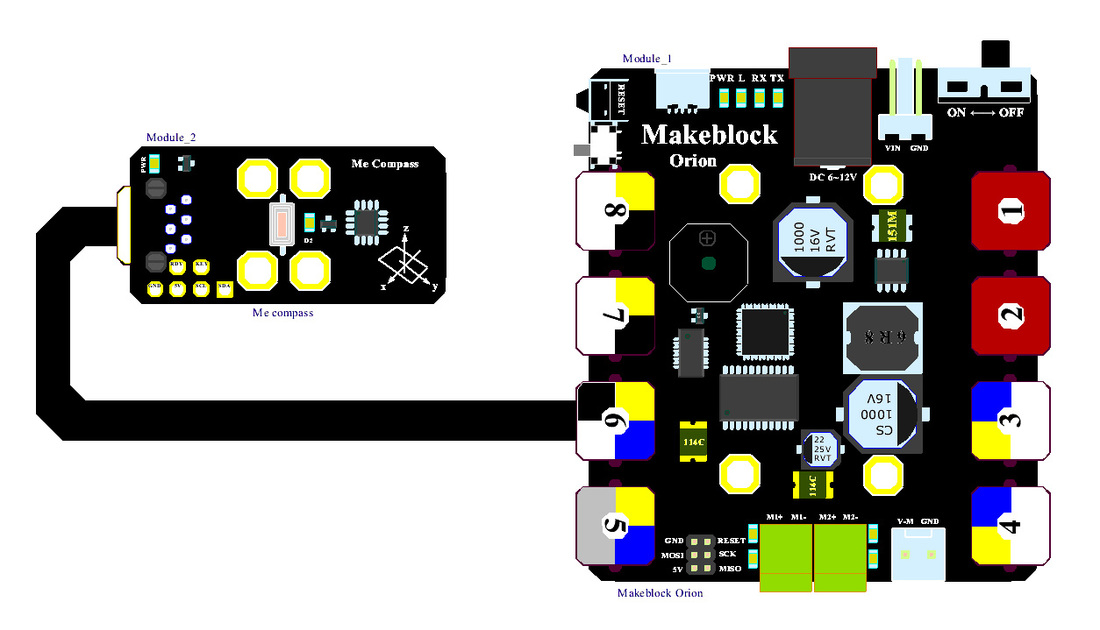 圖1. 電子羅盤模組與 Makeblock Orion連接 l 杜邦線連接 當使用杜邦線連接到Arduino Uno主機板時,模組SCL、SDA引腳需要連接到 I2C介面,即連接到A5、A4介面如下圖(圖2)所示: 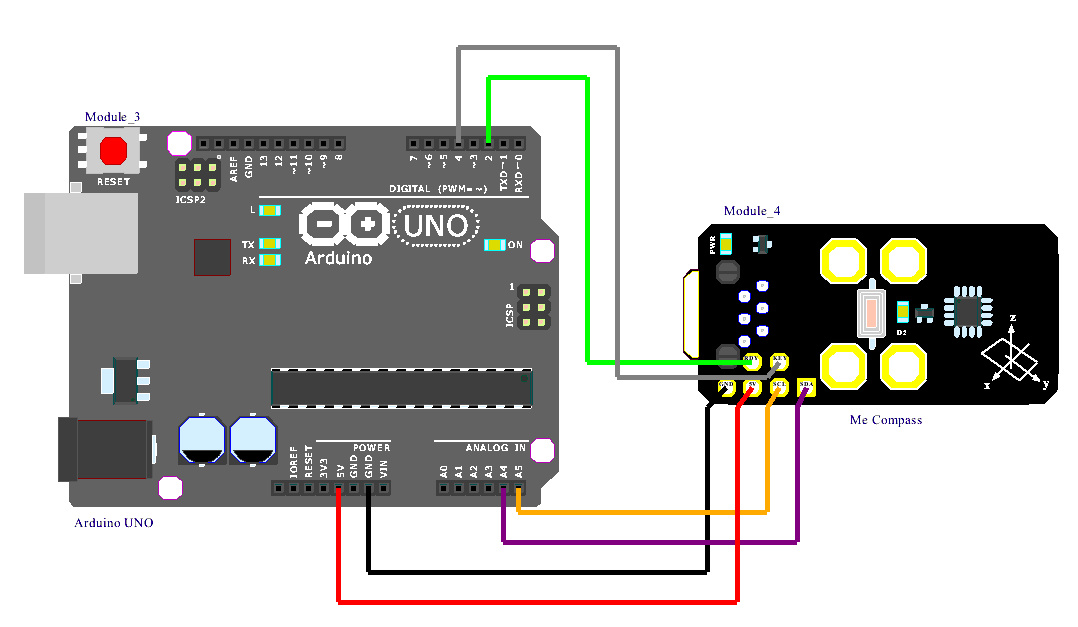 圖2. 電子羅盤模組與 Arduino UNO 連接圖 #include "MeOrion.h" #include <Wire.h> #include <SoftwareSerial.h> MeCompass myCompass(PORT_4); #define LED_PIN 13 void setup() { Serial.begin(9600); Serial.println("Initializing I2C devices..."); myCompass.init(); Serial.println("Testing device connections..."); Serial.println(myCompass.testConnection() ? "HMC5883L connection successful" : "HMC5883L connection failed"); } void loop() { int16_t head_X, head_Y, head_Z; double angle_number = 0; head_X = Compass.getHeadingX(); head_Y = Compass.getHeadingY(); head_Z = Compass.getHeadingZ(); angle_number = myCompass.getAngle(); Serial.println(angle_number, 1); delay(500); } 電子羅盤模組函數功能清單
6、注意事項 電子羅盤模組對其周圍磁場的變化比較敏感。模組周圍的機械結構發生變化或改變模組的方向,都有可能使模組周圍的磁場發生改變,從而使模組的測量結果有不同程度的偏差。這時,需要對模組進行校準一下,使得模組在當前的環境能夠準確的測量出角度值。 模組的校準流程如下: (1)將模組正確連接到Makeblock主控板,接通電源,並下載我們提供的任意一個電子羅盤的常式; (2)按住模組上的按鍵不放,直到模組上的藍色指示燈不斷地閃爍後,才鬆開按鍵; (3)在藍色指示燈閃爍的過程中,將模組(連同與其連接的機械結構)在你需要應用電子羅盤的平面上旋轉一周以上,最好能比較平穩地旋轉; (4)完成旋轉操作後,再按一下模組上的按鍵退出校準流程,模組上的藍色指示燈保持常亮; 備註: 模組有兩種工作模式:測量模式→藍燈常亮, 校準模式→藍燈閃爍; 若模組在當前環境下校準過一次,斷電重啟後不需要再校準; 模組在不需要校準的情況下,請不要按模組上的按鍵,否則會使之前的校準操作無效; 在校準過程中,須將模組(連同與其連接的機械結構)旋轉一周以上,否則會校準無效。 7、原理解析 傳統指南針用一根被磁化的磁鍼來感應地球磁場,地球磁場與磁鍼之間的磁力時磁鍼轉動,直至磁鍼的兩端分別指向地球的磁南極與磁北極。電子羅盤也一樣,只不過把磁鍼換成了磁阻感測器,然後將感受到的地磁資訊轉換為數位信號輸出給使用者使用。 三軸電子羅盤由三軸磁阻感測器、雙軸傾角感測器和MCU構成。三軸磁阻感測器用來測量地球磁場,傾角感測器是在磁力儀非水準狀態時進行補償;MCU處理磁力 儀和傾角感測器的信號以及資料輸出和軟鐵、硬鐵補償。三個互相垂直的磁阻感測器,每個軸向上的感測器檢測在該方向上的地磁場強度。感測器產生的模擬輸出信 號進行放大後送入MCU進行處理。
0 評論
發表回覆。 |
 RSS 訂閱
RSS 訂閱
