
Me Dual DC Motor Driver 1、概 述 雙直流馬達驅動模組通過板載RJ25埠,可以在恒定電流下驅動兩個直流馬達。該馬達驅動模組所用IC是一種高效的、低散熱的MOSFET,並且含有過流保護功能。本模組介面是紅色色標,代表輸入電壓值是6到12V,需要連接到主機板上帶有紅色標識連接埠。 2、技術規格 l 工作電壓:6-12V DC l 單通道持續輸出電流:1 A l 單通道峰值輸出電流:2 A l 馬達通道:2 l 模組尺寸:56 x 32 x 18 mm (長x寬x高) 3、功能特性 l 模組的白色區域是與金屬梁接觸的參考區域; l 帶有高效MOSFET基於H橋的馬達驅動模組IC; l 每個馬達最大1A持續電流(峰值2A); l 過電流保護; l 支援Arduino IDE程式設計, 並且提供運行庫來簡化程式設計; l 支援mBlock圖形化程式設計,適合全年齡用戶; l 使用RJ25介面連線方便; l 模組化安裝,相容樂高系列; l 配有V-M、PWM、DIR、GND接頭支援絕大多數Arduino系列主控板。 4、引腳定義 雙馬達驅動模組有四個針腳的接頭,每個針腳的功能如下表(表1):
表1. 4-Pin 接口功能表 5、接線方式 l RJ25連接 由於雙馬達驅動模組介面是紅色色標,當使用RJ25介面時,需要連接到主控板上帶有紅色色標的連接埠。以Makeblock Orion為例,可以連接到1、2號連接埠,如圖(圖1): 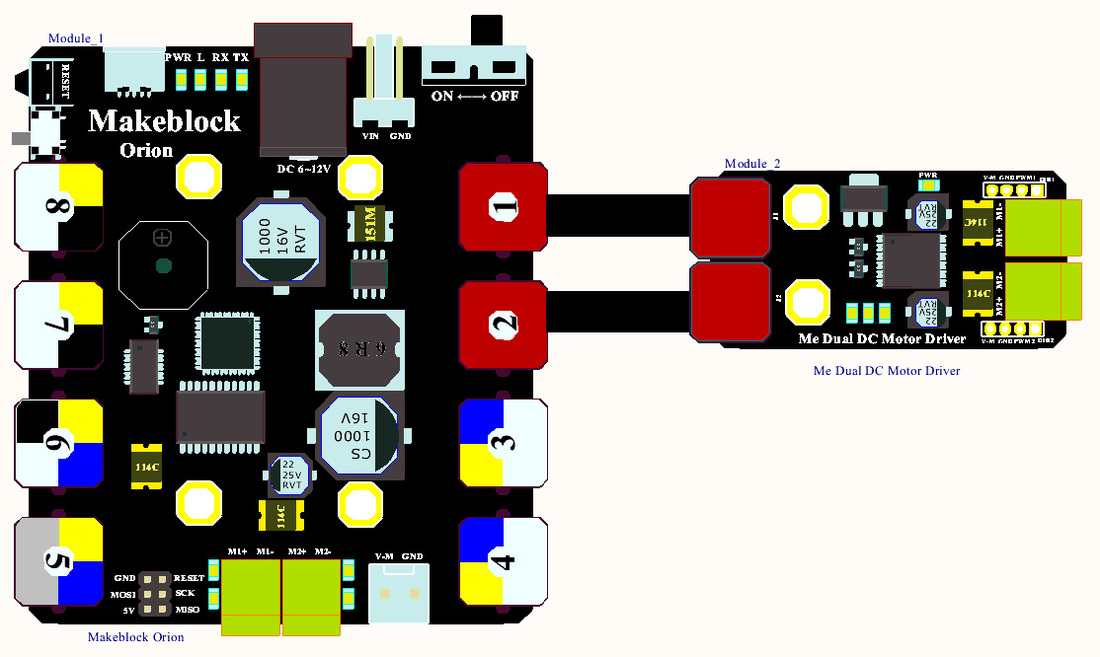 圖1. 雙馬達驅動模組與 Makeblock Orion連接 l 杜邦線連接 當使用杜邦線連接到Arduino Uno主機板時,模組PWM與DIR引腳需要連接到DIGITAL(數位)口,如下圖(圖2)所示: 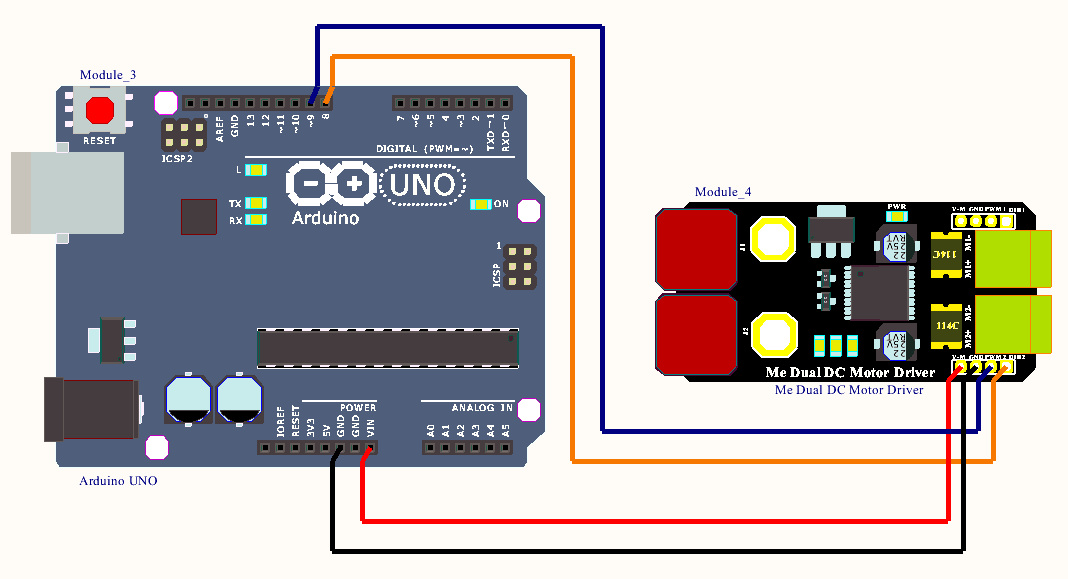 圖2. 雙馬達驅動模組 與 Arduino UNO連接圖 6、編程指南 l Arduino程式設計 如果使用Arduino程式設計,需要調用庫Makeblock-Library-master 來控制雙馬達驅動模組 本程式通過Arduino程式設計讓兩直流馬達同時做同向與反向轉動。 #include "MeOrion.h" #include <Wire.h> #include <SoftwareSerial.h> MeDCMotor motor1(PORT_1); MeDCMotor motor2(PORT_2); uint8_t motorSpeed = 100; void setup() { } void loop() { motor1.run(motorSpeed); motor2.run(motorSpeed); delay(2000); motor1.stop(); motor2.stop(); delay(100); motor1.run(-motorSpeed); motor2.run(-motorSpeed); delay(2000); motor1.stop(); motor2.stop(); delay(2000); } 雙馬達驅動模組函數功能清單
l mBlock程式設計 雙馬達驅動模組支援mBlock程式設計環境,如下是該模組指令簡介:
下面是使兩直流馬達向不同方向轉動,循環往復效果 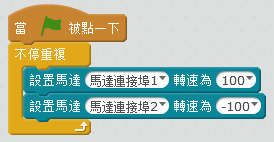 7、原理解析 直流馬達驅動原理:直流馬達加驅動電路目的是為了提供足夠大的電流,H橋驅動電路是為了控制直流馬達而設計的一種常見電路,它主要實現直流馬達的正反向驅動,其形狀類似於字母H,4個開關(MOSFET)所在位置稱為橋臂,而作為負載的直流馬達是像橋一樣架在上面,故稱之為H橋驅動。借助4個開關不同的開 合狀態,可以產生馬達的4個工作狀態:正轉、反轉、刹車與惰行。
0 評論
發表回覆。 |

 RSS 訂閱
RSS 訂閱

全佑電腦- 機器人科學館 © 2013 All RightReserved. TEL:(+886) 03-9560365 265 宜蘭縣羅東鎮公正路298號 No.298, Gongzheng Rd., Luodong Township, Yilan County 265, Taiwan (R.O.C.) 聯絡我們 |
|