
Me Encoder Motor Driver 1、概述 直流編碼馬達驅動模塊支援雙通道直流編碼馬達,並且可以分別對其速度與方位進行精確的控制。通過Makeblock官網提供的軟件可以調控馬達的PID參數使它能在不同環境下達到最佳工作狀態。馬達的齒輪減速比爲46,同樣可以在軟體中對其進行修改。本模塊介面是紅色色標,代表輸入電壓值是6到12V,需要連接到主控板上帶有紅色標識的連接埠。 2、技術規格 l 馬達通道:2 l 工作電壓:6V到12V DC l 單通道最大持續電流:1 A l 工作溫度:-40到85℃ l 模塊尺寸:67.5 x 32 x 18 mm (長x寬x高) 3、功能特性 l 模塊的白色區域是與金屬梁接觸的參考區域; l 精確控制馬達位置與速度; l 即時位置與速度反饋; l 帶有高效MOSFET的馬達驅動模塊IC; l 每個馬達最大1A持續電流; l 過電流保護; l 支援Arduino IDE編程, 並且提供運行庫來簡化編程; l 支持mBlock圖形化編程,適合全年齡用戶; l 使用RJ25介面連線方便; l 模塊化安裝,相容樂高系列; l 配有SCL、SDA、VCC、GND接頭支援絕大多數Arduino系列主控板。 4、引腳定義 直流編碼馬達驅動模塊有四個針腳的接頭,每個針腳的功能如下表(表1):
表1. 4-Pin 接頭功能表 5、接線方式 l RJ25連接 由於直流編碼馬達驅動模塊連接埠是紅色色標,當使用RJ25介面時,需要連接到主控板上帶有紅色色標的連接埠。以Makeblock Orion爲例,可以連接到1,2號連接埠,如圖(圖1): 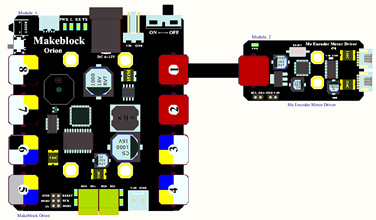 圖1. 直流編碼馬達驅動模塊與 Makeblock Orion連接 l 杜邦線連接 當使用杜邦線連接到Arduino Uno主控板時,模塊SCL、SDA引腳需要連接到 I2C介面,即連接到A5、A4介面如下圖(圖2)所示: 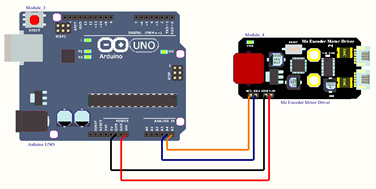 圖2. 直流編碼馬達驅動模塊與 Arduino UNO 連接圖 6、編程指南 l Arduino編程 如果使用Arduino編程,需要調用庫Makeblock-Library-master 來控制直流編碼馬達模塊 本程式通過Arduino編程讓馬達順時針以三種速度轉動 #include "MeOrion.h" #include <SoftwareSerial.h> #include <Wire.h> MeEncoderMotor motor1(0x09, SLOT1); void setup() { motor1.begin(); Serial.begin(9600); } void loop() { motor1.RunSpeed(50); delay(2000); motor1.RunSpeed(100); delay(2000); motor1.RunSpeedAndTime(150, 2000); delay(3000); } 直流編碼馬達函數功能列表
l mBlock編程 直流編碼馬達驅動模塊支援mBlock編程環境,如下是該模塊指令簡介
下面是將編碼馬達速度由小到大轉動,循環重複效果 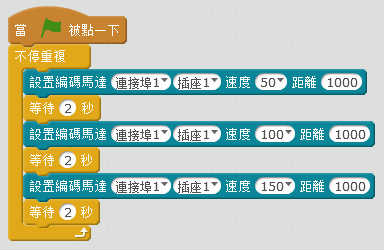 7、原理解析 直流編碼馬達驅動的編碼馬達與普通直流馬達區別之處在於編碼馬達包含了磁性編碼器。採用磁場原理産生信號的優勢是磁場信號不會受到灰塵,濕氣,高溫及振動的影響。在磁性編碼器內部採用一個磁性轉盤和一個霍爾傳感器。磁性轉盤的旋轉會引起內部磁場強度的變化。當交變磁場經過時,霍爾傳感器産生輸出電壓脈沖,脈沖的幅度是由激勵磁場的場強決定的。磁盤每旋轉一個磁化長度,磁場變化半周,信號輸出則變化一個週期,磁盤上磁極對的數量和輸出信號的週期數在旋轉一周時是相等的。所以通過測定輸出信號的週期就可知道磁盤的位置和轉速。
0 評論
發表回覆。 |

 RSS 訂閱
RSS 訂閱

全佑電腦- 機器人科學館 © 2013 All RightReserved. TEL:(+886) 03-9560365 265 宜蘭縣羅東鎮公正路298號 No.298, Gongzheng Rd., Luodong Township, Yilan County 265, Taiwan (R.O.C.) 聯絡我們 |
|