
Me Stepper Motor Driver 1、概 述 步進馬達驅動模組是用來精確驅動雙極步進馬達的。當有脈衝輸入,步進馬達一步一步地轉動,每給它一個脈衝信號,它就轉過一定的角度。它可以用在3D列印、數控、Makeblock音樂機器人以及精確動作控制等方面。本模組貼有紅色色標,我們需要使用RJ25連接線連接到主控板上帶有紅色標識的介面。 2、技術規格 l 最大驅動電壓:12VDC l 最大電流:1.35A 3、功能特性 l 相容4線雙極步進馬達; l 只需要兩個埠就可以控制步進和方向; l 可調電位器可以調節最大電流輸出,改變步進馬達扭矩; l 具有板上撥碼開關支援 全, 半, 1/4, 1/8, 1/16步進模式; l 具有接地短路保護和載入短路保護; l 具有反接保護,電源反接不會損壞IC; l 模組的白色區域是與金屬梁接觸的參考區域; l 支援Arduino IDE程式設計, 並且提供運行庫來簡化程式設計; l 支援mBlock圖形化程式設計,適合全年齡用戶; l 使用RJ25介面連線方便; l 模組化安裝,相容樂高系列; l 配有接頭支援絕大多數Arduino系列主控板。 4、引腳定義 步進馬達驅動模組有7個針腳的接頭,每個針腳的功能如下表(表1):
表1. 7-Pin 接點功能 5、接線方式 l RJ25連接 由於步進馬達驅動模組介面是紅色色標,屬於馬達驅動。當使用RJ25介面時,需要連接到主控板上帶有紅色色標的介面。以Makeblock Orion為例,可以連接到1,2號連接埠,如圖(圖1): 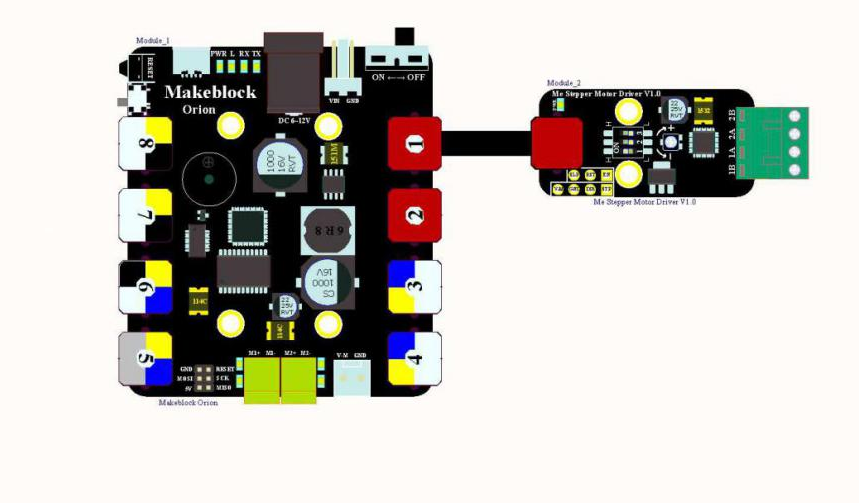 圖1. 步進馬達驅動模組與 Makeblock Orion連接 註:驅動板長時間工作,晶片會發熱,使用的時候請注意。有需要的話可以在上面加個散熱片,幫助晶片散熱 l 杜邦線連接 當使用杜邦線連接到Arduino Uno主機板時,EN接低電平,RST和SLP接高電平,STP和DIR引腳需要連接到 ANALOG(類比)口(也可以只連接STP、DIR管腳),如下圖(圖2)所示: 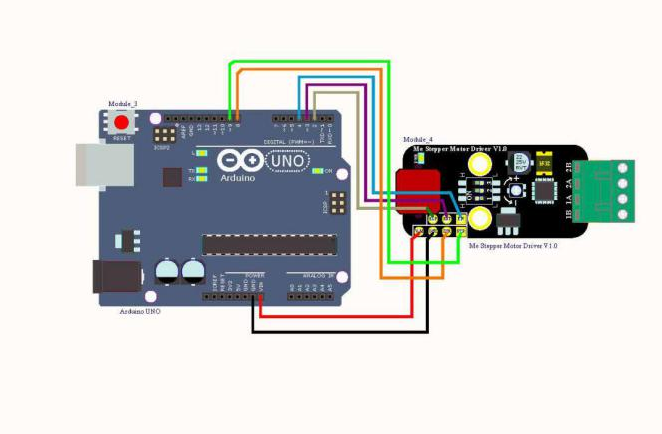 圖2. 步進馬達驅動模組 與 Arduino UNO 連接圖 6、程式設計指南 l Arduino程式設計 如果使用Arduino程式設計,需要調用庫Makeblock-Library-master 來控制步進馬達驅動模組本程式通過Arduino程式設計讓馬達按需求轉動。 #include "MeOrion.h" #include <SoftwareSerial.h> #include <Wire.h> #include <AccelStepper.h> int dirPin = mePort[PORT_1].s1; int stpPin = mePort[PORT_1].s2; AccelStepper stepper(AccelStepper::DRIVER, stpPin, dirPin); void setup() { Serial.begin(9600); stepper.setMaxSpeed(1000); stepper.setAcceleration(20000); } void loop() { if(Serial.available()) { char a = Serial.read(); switch(a) { case '0': stepper.moveTo(0); break; case '1': stepper.moveTo(200); break; case '2': stepper.move(50); break; case '3': stepper.move(100); break; case '4': stepper.move(200); break; case '5': stepper.move(400); break; case '6': stepper.move(600); break; case '7': stepper.move(4000); break; case '8': stepper.move(8000); break; case '9': stepper.move(3200); break; } } stepper.run(); } 步進馬達驅動模組 函數功能清單
l mBlock程式設計 步進馬達驅動模組支援mBlock程式設計環境,如下是該模組指令簡介
以下是如何使用mBlock控制步進馬達驅動模組的例子: mBlock可以使步進馬達在不同時間段速度由小到大轉動,循環往復。 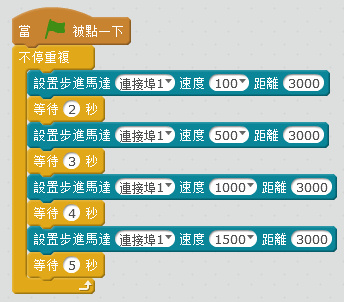 7、原理解析 步進電動機是一種將脈衝信號變換成相應的角位移(或線位移)的電磁裝置,是一種特殊的電動機。一般電動機都是連續轉動的,而步進電動機則有定位和運轉兩種基本狀態,當有脈衝輸入時,步進電動機一步一步地轉動,每給它一個脈衝信號,它就轉過一定的角度 本模組主要元件為A4988微步驅動器,可在全、半、1/4、 1/8 及 1/16 步進模式時操作雙極步進電動機,在具體的使用中我們只要控制 STEP 和 DIR 就可以了。例如:當為全步進模式時,轉一圈要 200步(即每一步1.8°)。如果要求更高的精度,我們可以通過選擇其他的模式,比如我們如果選擇 1/4 步進模式,那麼電機轉一圈就要800 個微步才能完成。 模組步進模式選擇表:
模組上有電位器,可以通過其來調節馬達的扭矩,但使用時不宜將其調節過大,否則容易因為發熱而將晶片燒毀。
0 評論
發表回覆。 |

 RSS 訂閱
RSS 訂閱
