
|
實現原理: Intel Edison通過USB採集支援MJPEG的攝像頭資料通過WIFI發佈視頻流。同時使用者通過流覽器遠端監控視頻流,並可以發送控制指令給Edison。Edison將控制指令通過串口轉發給Makeblock 履帶車,從而實現WIFI視頻小車的功能。 準備材料: Intel Edison Mini Breakout Board Makeblock BaseBorad主控板 Makeblock Starter Kit 螺絲M4 螺絲M2.5 銅螺柱M4 尼龍螺柱M4 尼龍螺柱M2.5 Me RJ25 Adapter 舵機 舵機支架 USB攝像頭(支持MJPEG、UVC) 杜邦線 7.4V鋰電池 3D列印支架 USB轉接線 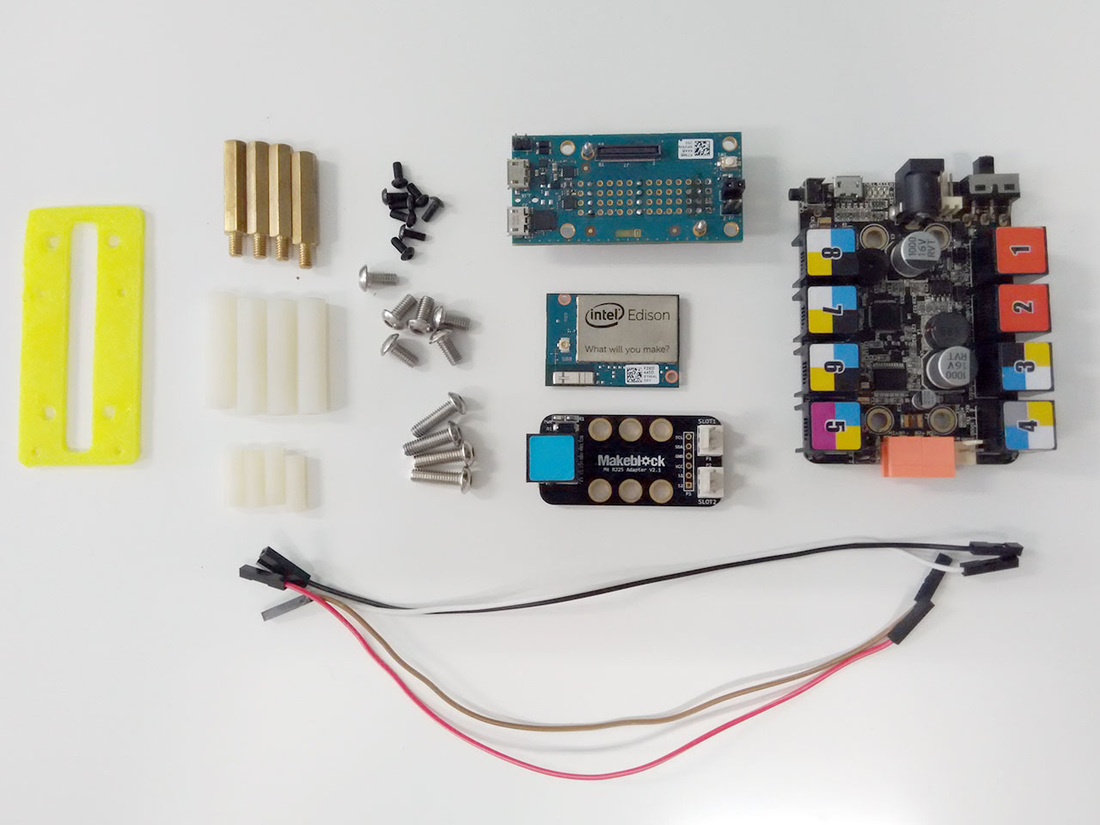 開始機械和電子模組的安裝 1、首先要引出Edison上的串口,如圖所示,引出的串口將與Makeblock主控板上的串口連接並通訊。 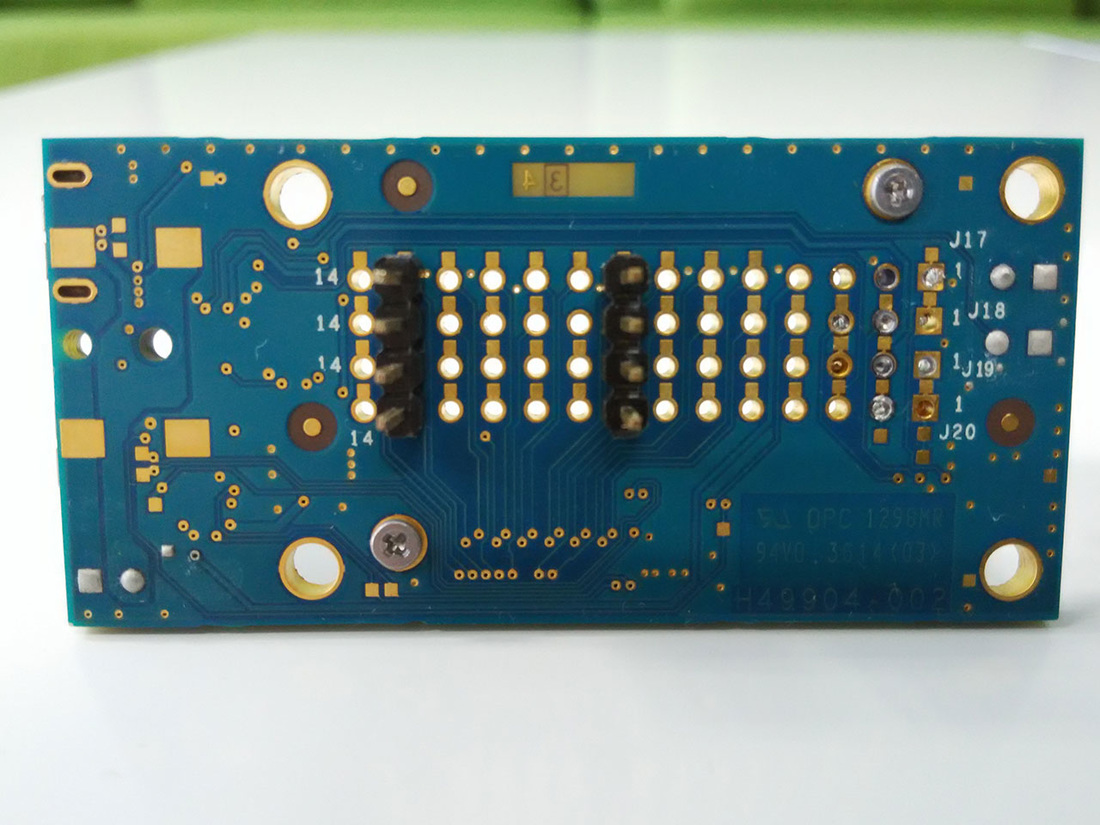 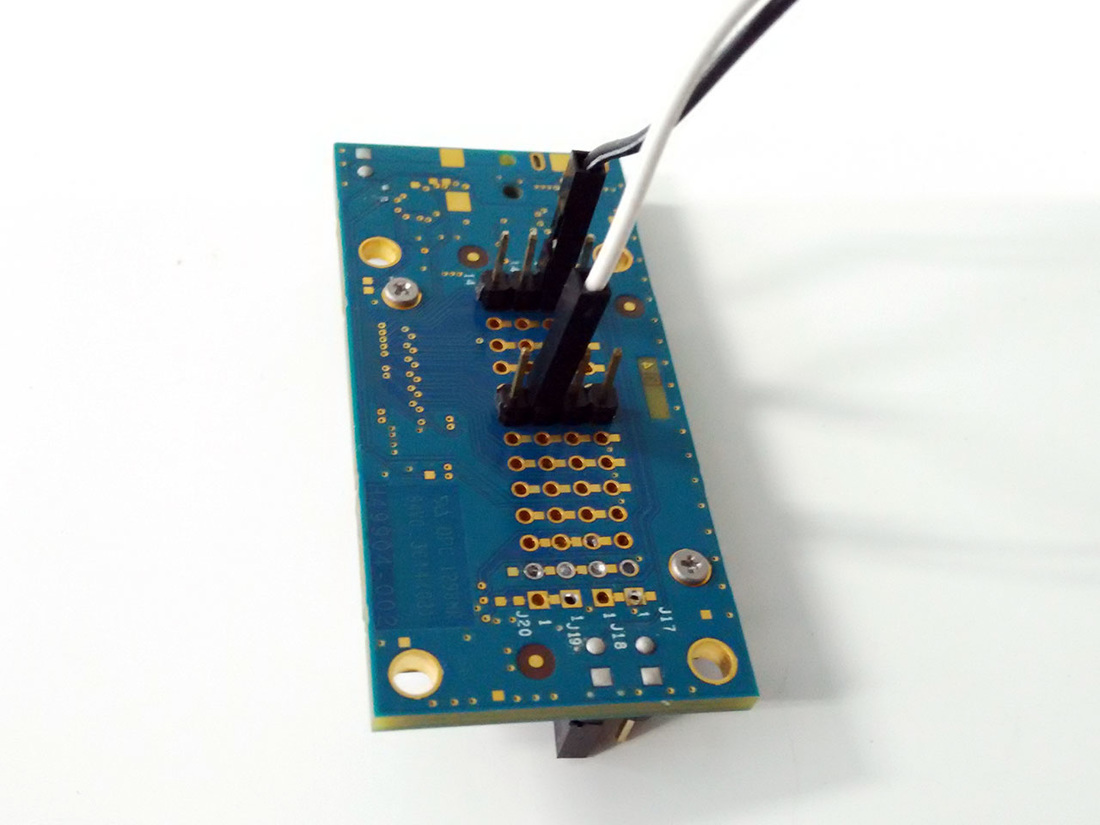  2、通過螺柱和3D列印件,將Edison與Makeblock主控板組合起來 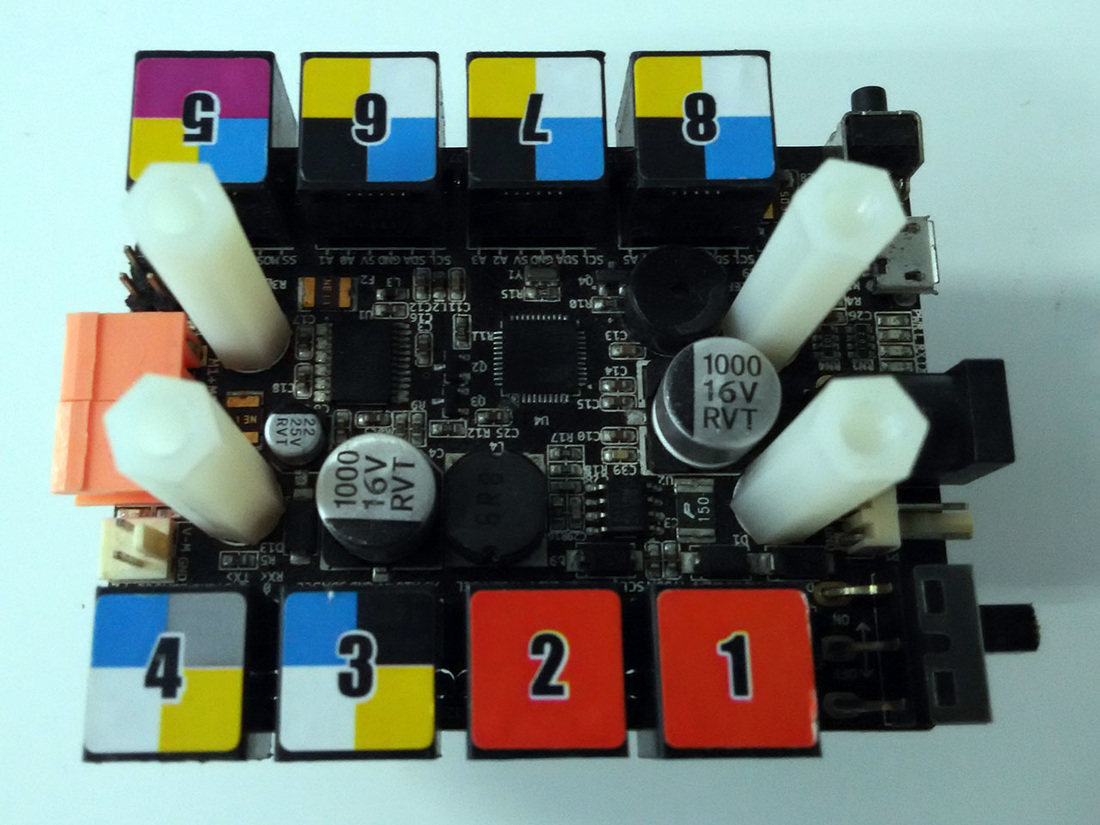   3、攝像鏡頭通過舵機控制上下轉動  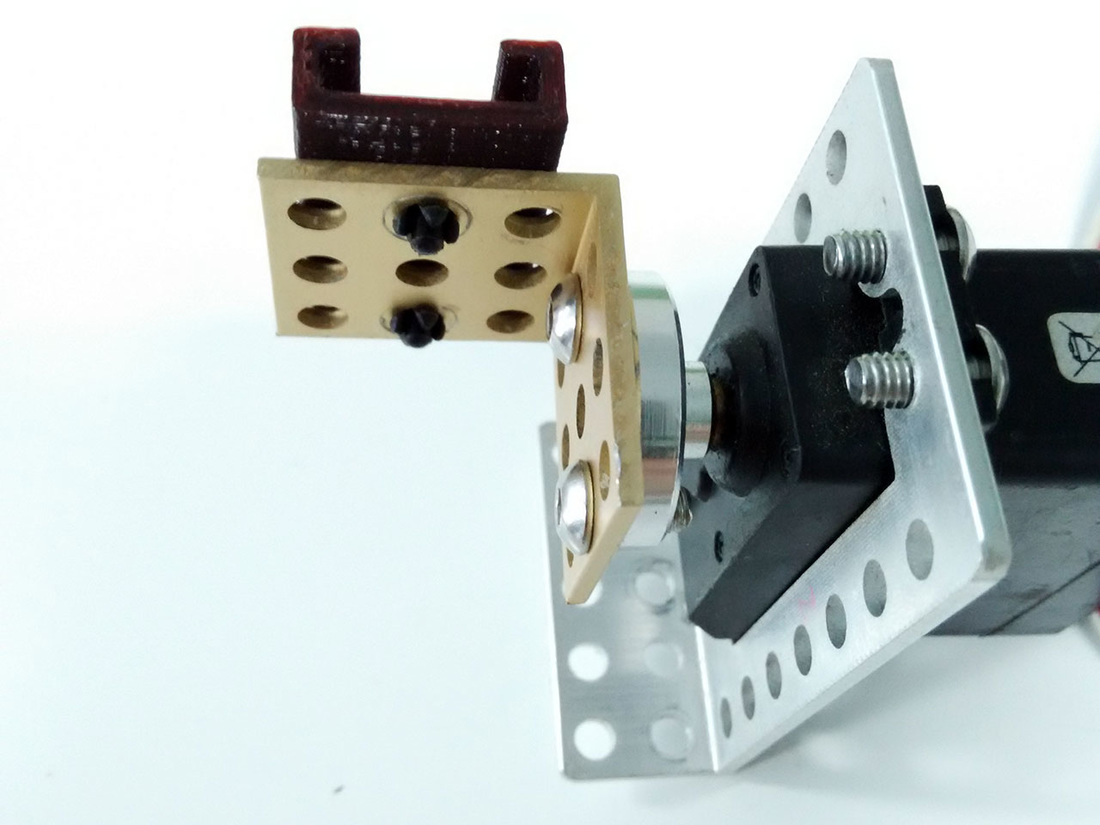 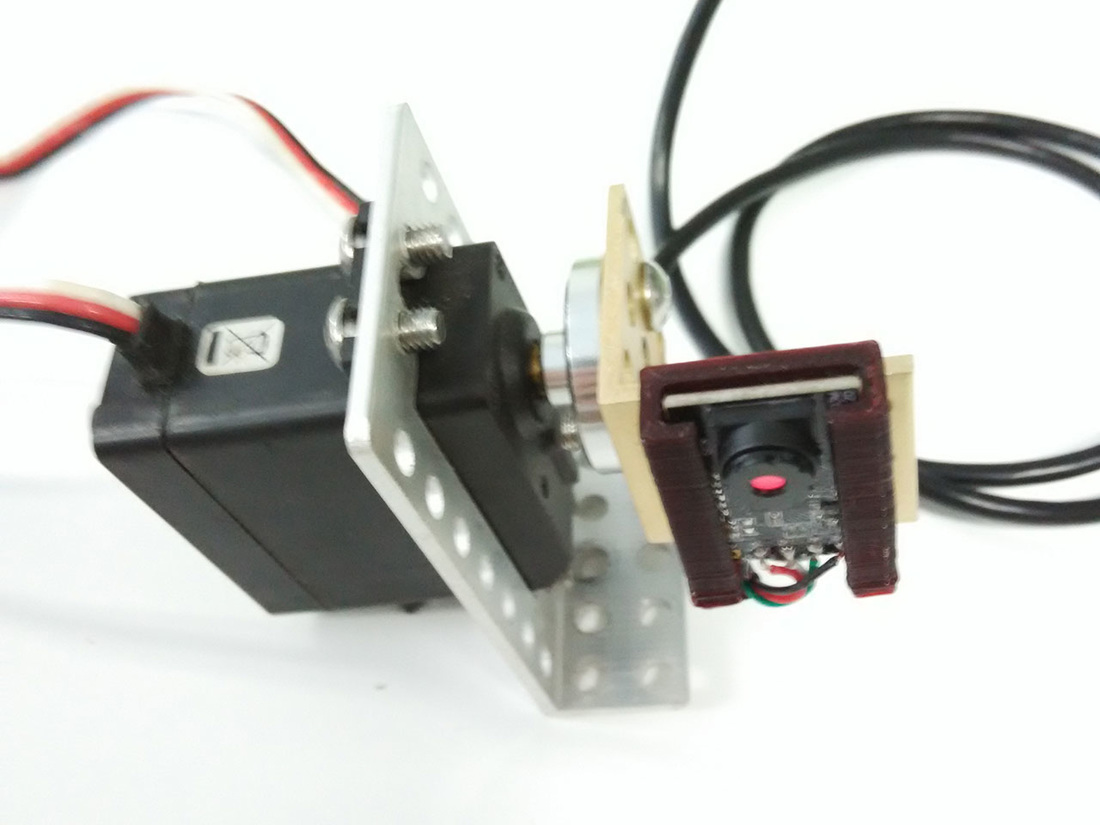 4、將主控板組合與舵機組合分別安裝到Makeblock入門套件的履帶車上。 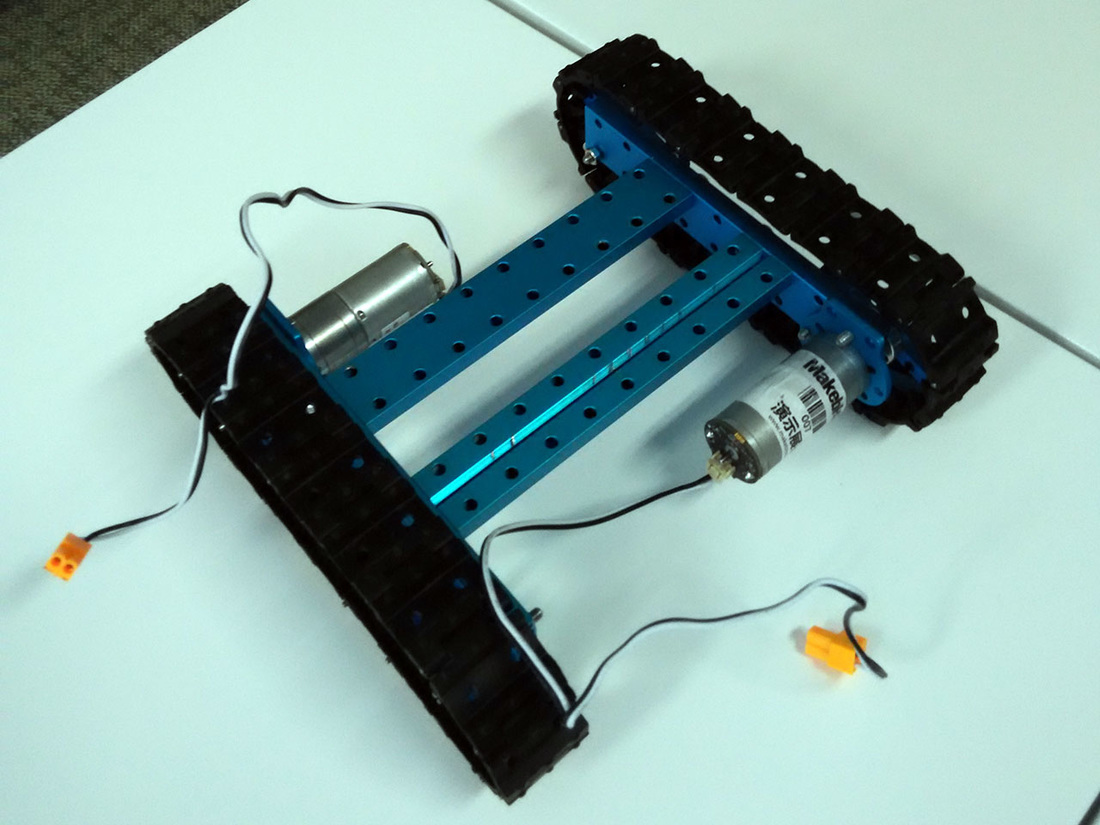 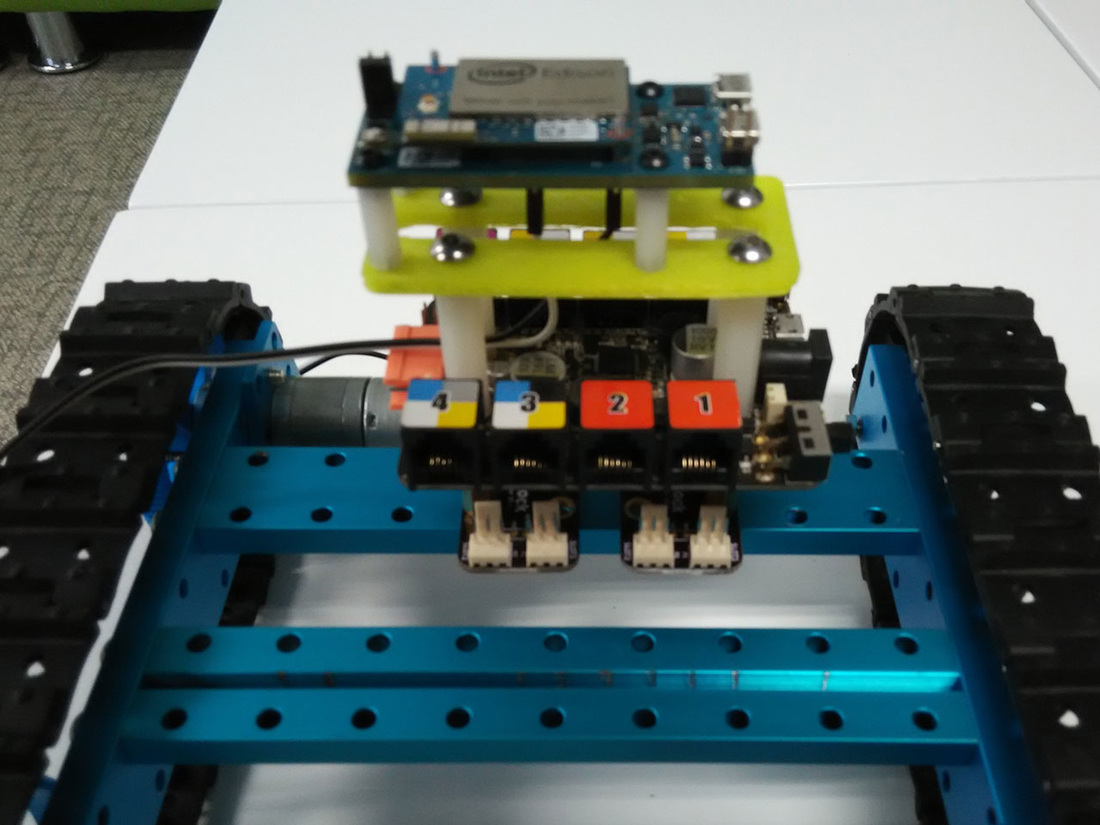 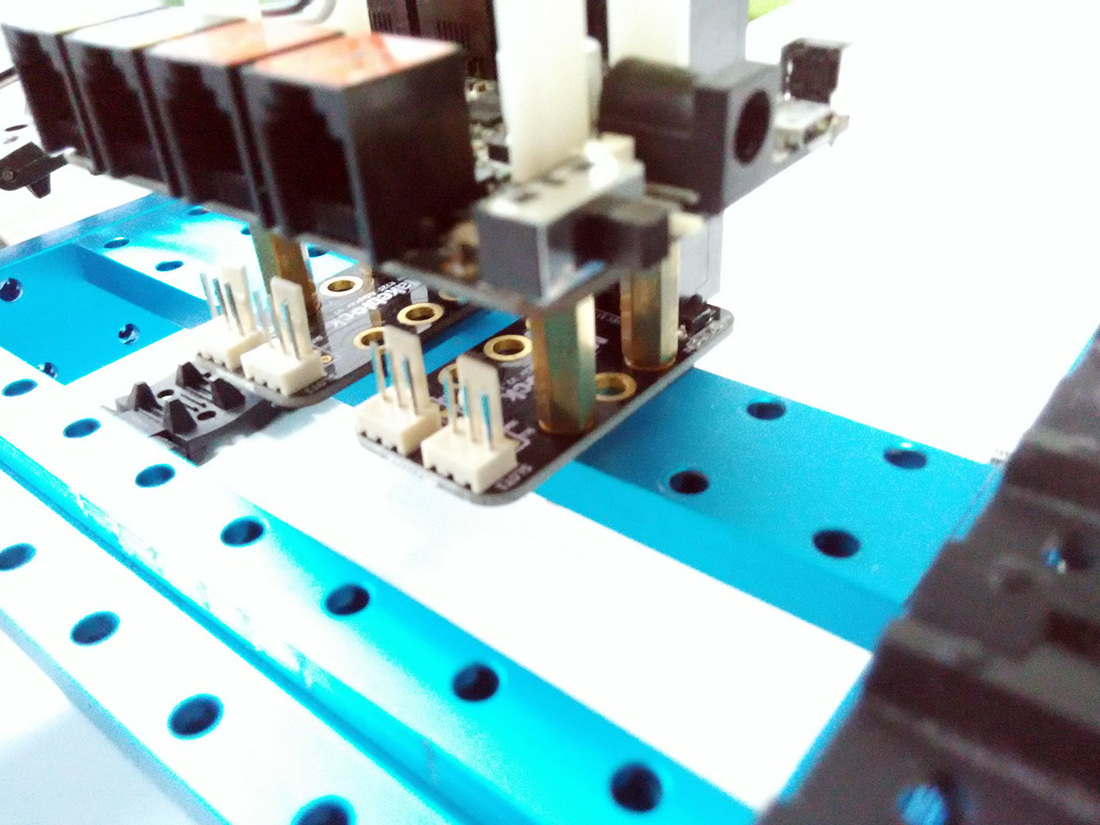 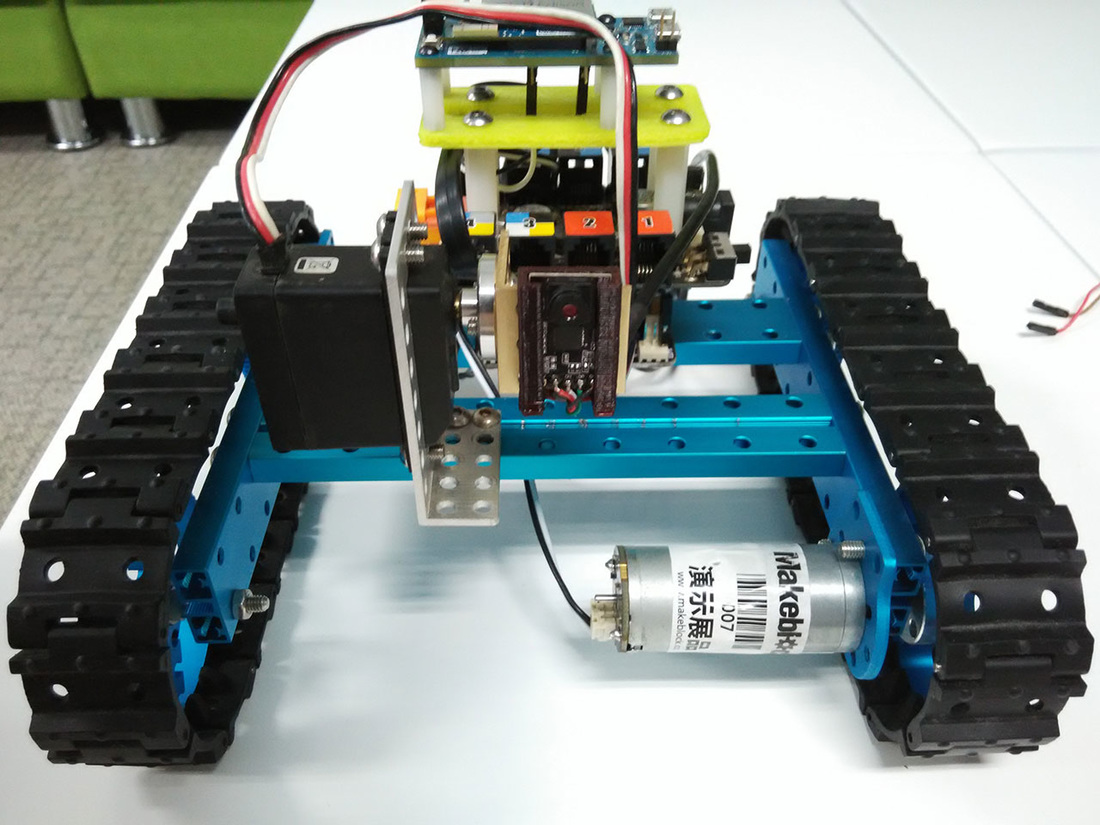 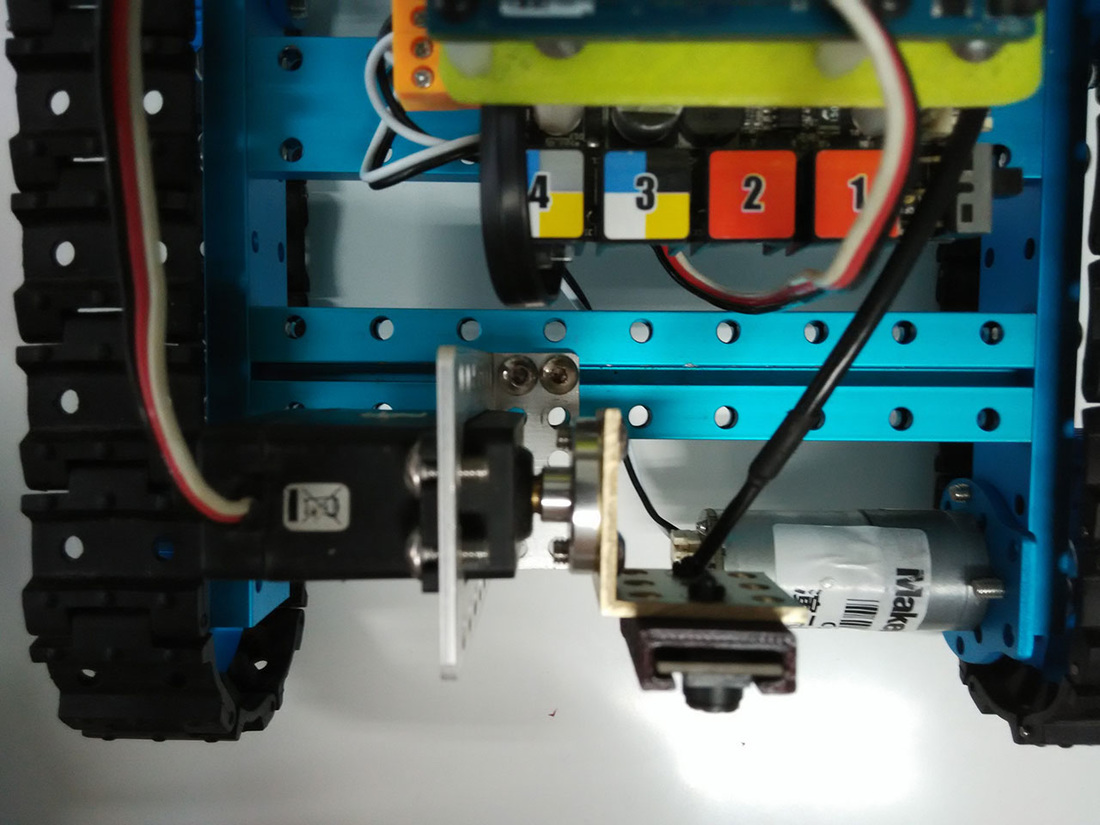 5、Makeblock主控板提供電源輸出,按下圖所示為Edison提供至少7v以上的電源。同時將Edison串口引腳和舵機連接在Me RJ Adapter上。(其中連Edison串口的Me RJ Adapter接在Makeblock主控板帶有硬串口的Port4或者Port5,帶舵機的Me RJ Adapter接Port6) 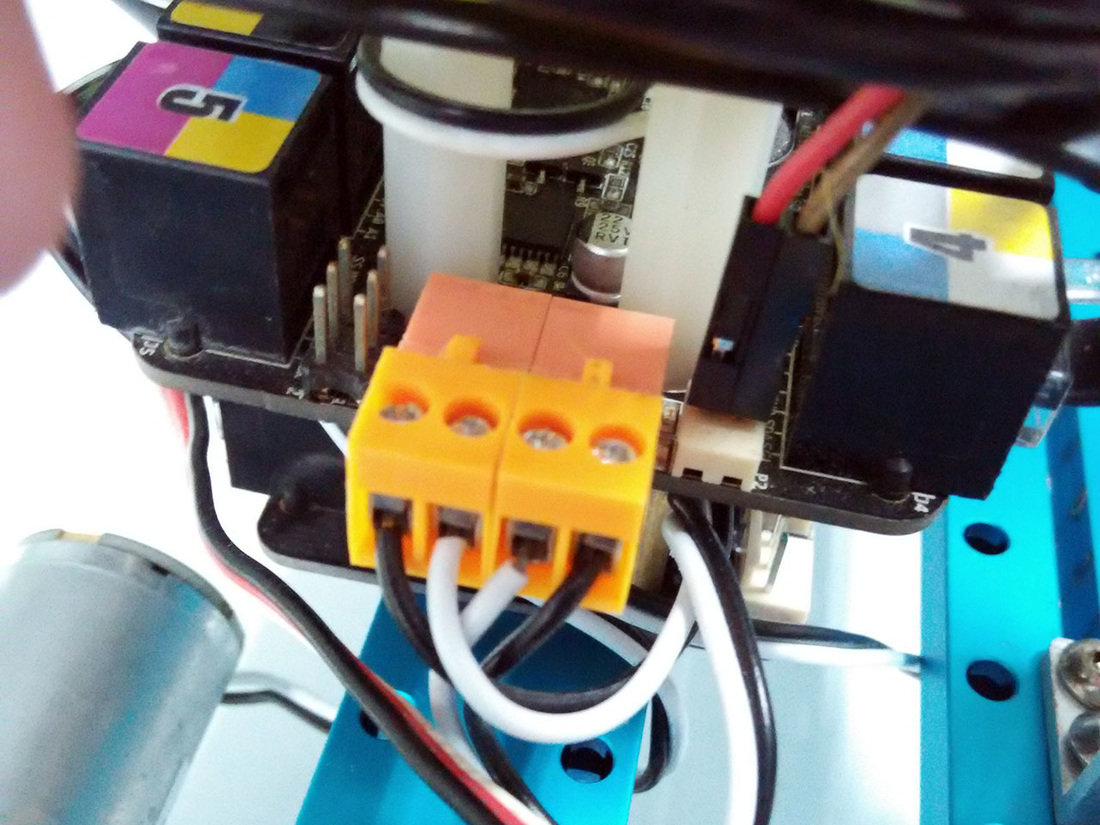 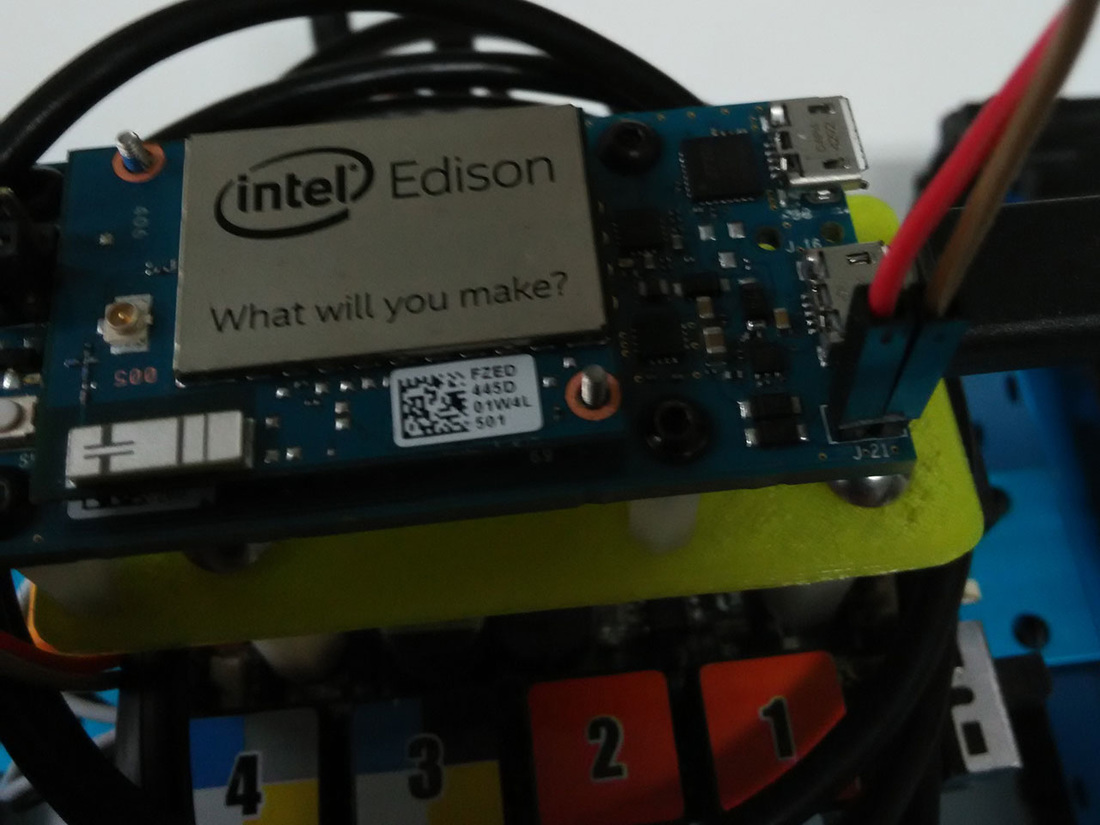 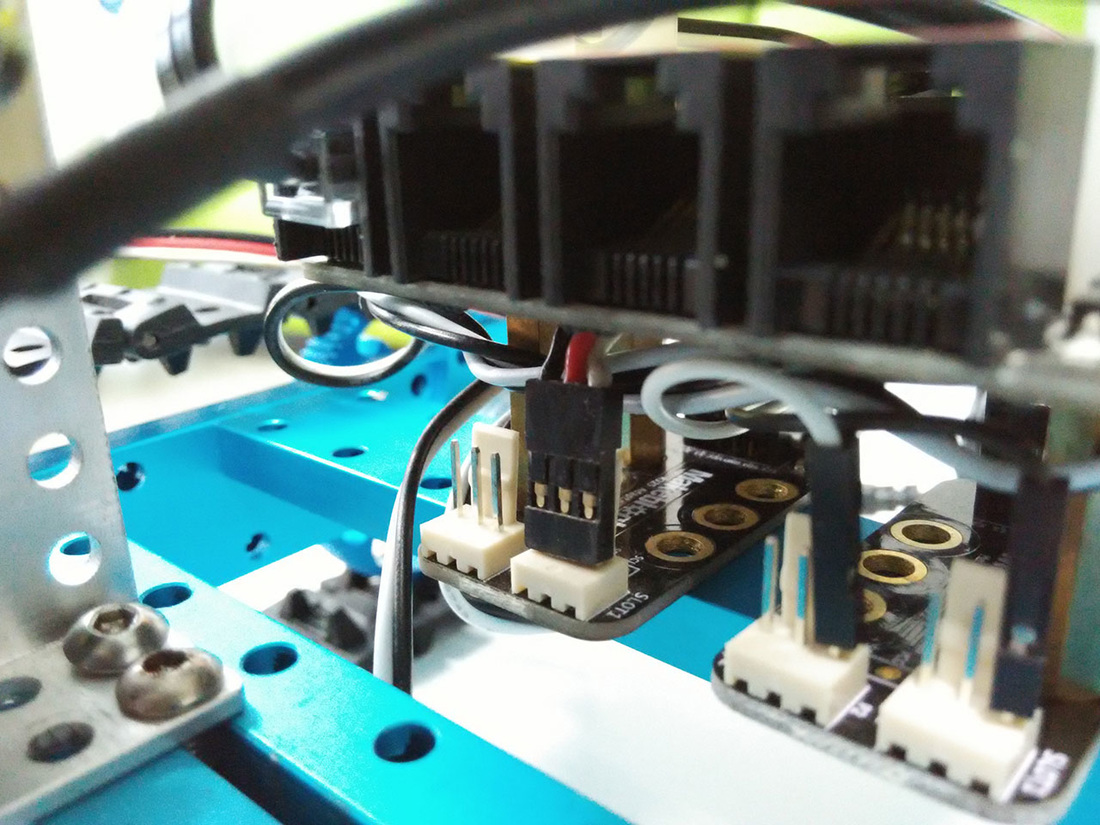 6、攝像鏡頭通過USB轉接線插在Edison的USB Host口上,7.4V鋰電池插入Makeblock主控板的電源口,這樣機械和電子部分就安裝完畢。 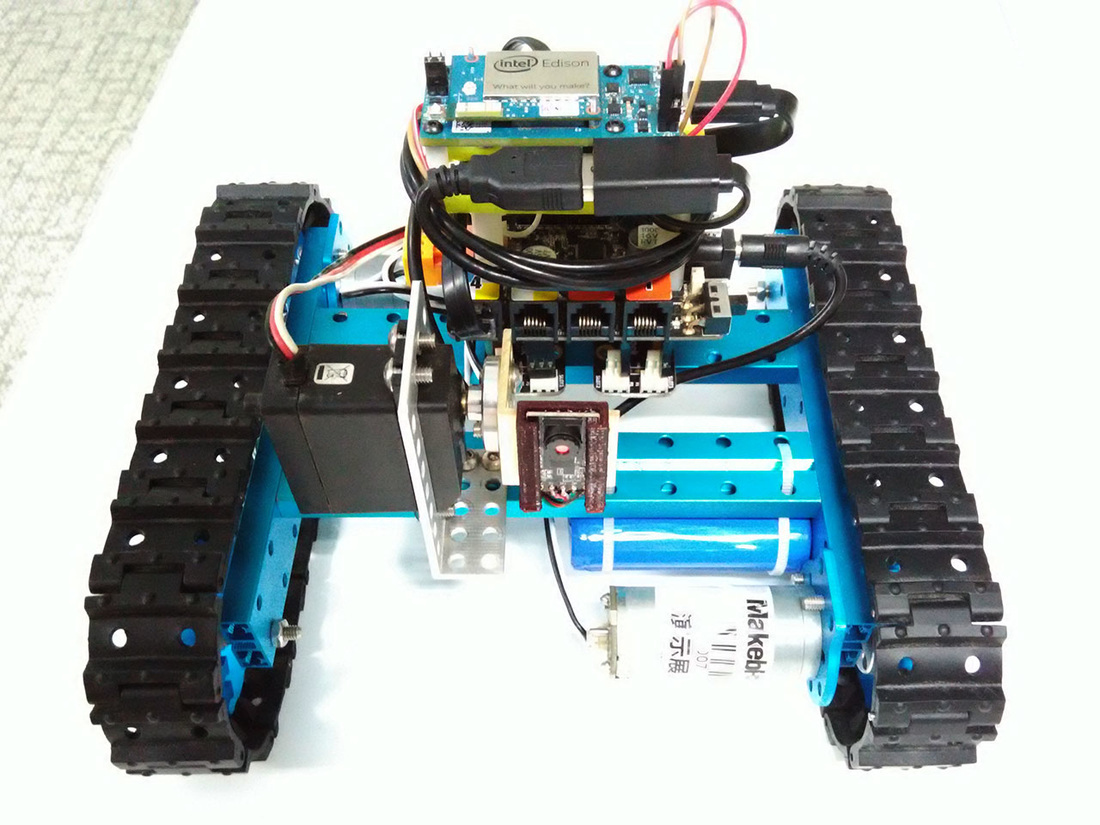 軟體部分 1、首先得給Intel Edison安裝系統,這個按照官方指引來。 https://software.intel.com/en-us/iot/library/edison-getting-started 2、配置Edi-Cam https://github.com/xeecos/edi-cam (1)我們可以通過串口或者WiFi網路使用SSH登錄Edison的系統。WiFi SSH的前提是讓Edison和你的電腦在同一個WiFi網路下。 在終端下輸入下面指令: $ ssh [email protected]@myedison.local's password:root@myedison:~# 用你的Edison名稱替換myedison 。 然後輸入配置Edison時設置的密碼。 (2)設置協力廠商repository, 將下面的代碼添加在 /etc/opkg/base-feeds.conf: src/gz all http://repo.opkg.net/edison/repo/allsrc/gz edison http://repo.opkg.net/edison/repo/edison src/gz core2-32 http://repo.opkg.net/edison/repo/core2-32 (3)更新opkg opkg update (4)安裝Git opkg install git (5)安裝UVC驅動 如果是最新的 Edison Yocto 系統,已經包含UVC驅動,不再需要安裝。 (6)安裝ffmpeg 回到Git專案的bin目錄,執行./install_ffmpeg.sh (7)安裝Node.js應用包 進入web/robotjs,執行npm install 啟動程式 (1)打開 web/robotjs/client/index.html,更新 wsUrl指向Edison的網路位置,如下所示: // CHANGE THIS TO THE APPROPRIATE WS ADDRESS var wsUrl = 'ws://myedison.local:8084/'; (2)運行 Node.js 服務 進入 web/robotjs. 執行 node server.js. 終端可以看到啟動資訊: WebSocket server listening on port 8084 HTTP server listening on port 8080 Listening for video stream on port 8082 Stream Connected: 127.0.0.1:52995 size: 640x480 Viewing the video stream (3)這樣就可以通過流覽器進入 http://myedison.local:8080,顯示視頻和控制介面。 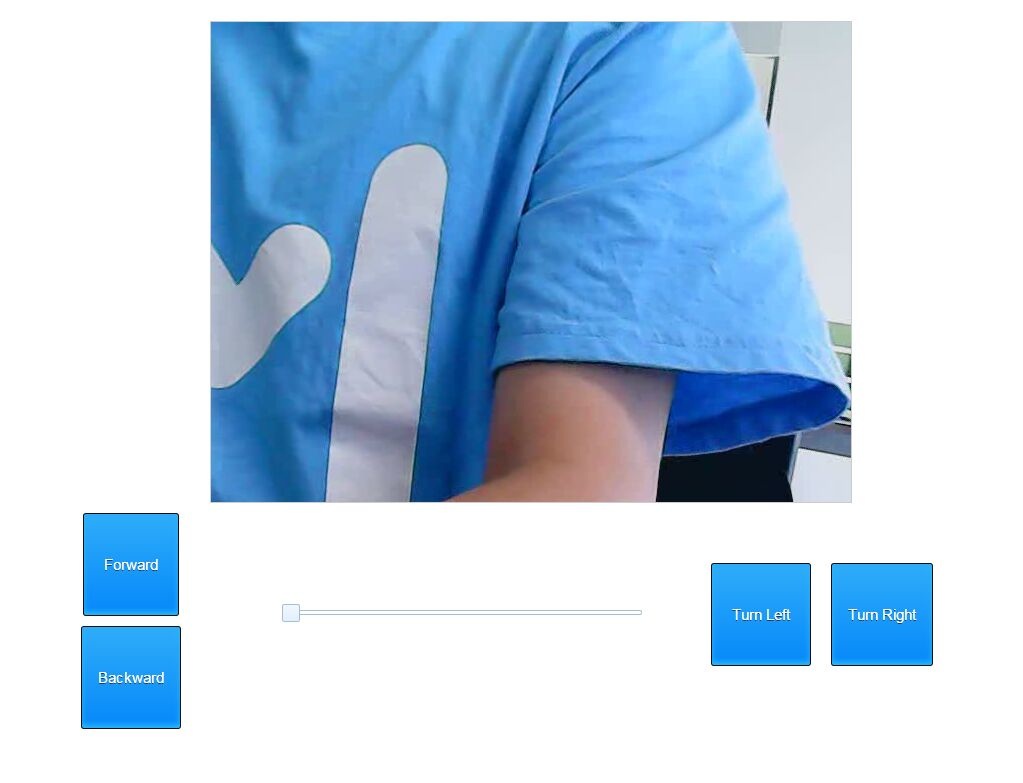
0 評論
發表回覆。 |
 RSS 訂閱
RSS 訂閱

全佑電腦- 機器人科學館 © 2013 All RightReserved. TEL:(+886) 03-9560365 265 宜蘭縣羅東鎮公正路298號 No.298, Gongzheng Rd., Luodong Township, Yilan County 265, Taiwan (R.O.C.) 聯絡我們 |
|